New Features in Aimsun Next 22¶
Introduction¶
This topic summarizes the key new developments in Aimsun Next 22.
Aimsun Next 22: Highlights¶
The most significant additions to Aimsun Next 22 include the following:
- Battery Consumption Model for electric vehicles
- Microscopic Free-flow aCceleration Model (MFC) for microsimulations
- Engine-type composition is available for environmental models
- Split parent centroids and redistribute demand to the newly created child centroids
- Enhancements to joining centroids
- More control over outputs for static assignments and adjustments
- Dynamic transit assignment for mesosimulations
- Transit stop dialogs updated for clarity
- Reroute transit lines as part of traffic management and edit detours
- Pedestrian behavior improved at flashing signals
- New pedestrian agent messages in the External Agent Interface
- Time-dependent shortest paths
- Start a DUE with a path assignment plan containing multiple macro assignments
- Vehicles to stay close to the side of the road
- VS-PLUS controller dialog enhanced with the OCIT Views Configuration tab
- Sitraffic detection patterns and detection pattern templates comply with OCIT standards
- A vehicle's Relative Position to the Leader attribute is available via API
- Updated RGap calculation
- US English for the user interface
1. Battery Consumption Model for electric vehicles (microsimulations)¶
We now offer a Battery Consumption Model in addition to our Fuel Consumption Model. It enables you to measure and visualize the performance of electric vehicles' energy consumption in miscroscopic simulations.
The model depends on vehicle dynamics, taking into account the different processes involved in the operation of electric vehicles, and also considers the ambient temperature due to the accessory power required to heat (or cool) the vehicle cabin.
To function, this needs the MFC Model to be activated because vehicles' internal parameters are set by Euro Car Segment. Currently the Battery Consumption Model only works for the vehicle type Car.

2. Microscopic Free-flow aCceleration Model (MFC)¶
There is a new acceleration model called the Microscopic Free-flow aCceleration Model (MFC) for the microscopic simulator. It can capture, accurately and consistently, the acceleration dynamics of vehicles by averaging engine parameters by vehicle categories, taking into account different road conditions and driver behavior. Currently the model only works for the vehicle type Car, averaging the Euro Car Segments A, B, C, D, E, F, and M.
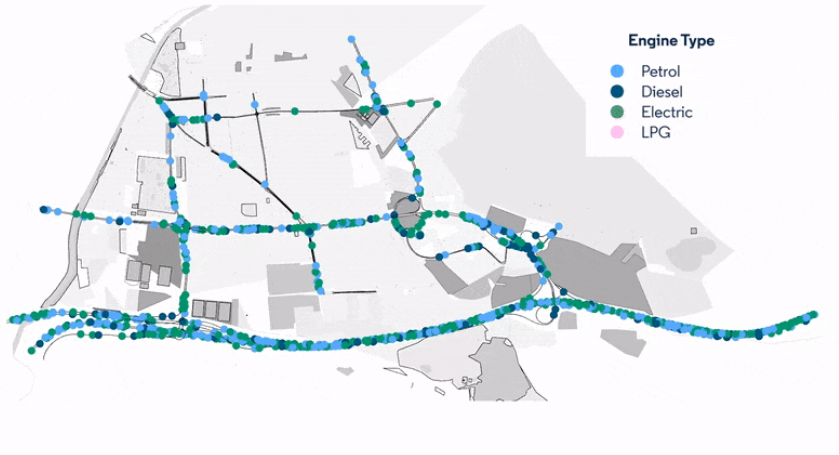
3. Engine-type composition¶
The engine-type composition of the vehicle fleet is now included in the Vehicle Type dialog. You can use it to set the engine type required by our five environmental models. It also applies to our new microscopic acceleration model, the MFC Model.
The environmental models now include the emission models: QUARTET, Panis et al., and the London Emission Model (LEM) plus two energy-related models: the Fuel Consumption Model and the Battery Consumption Model.
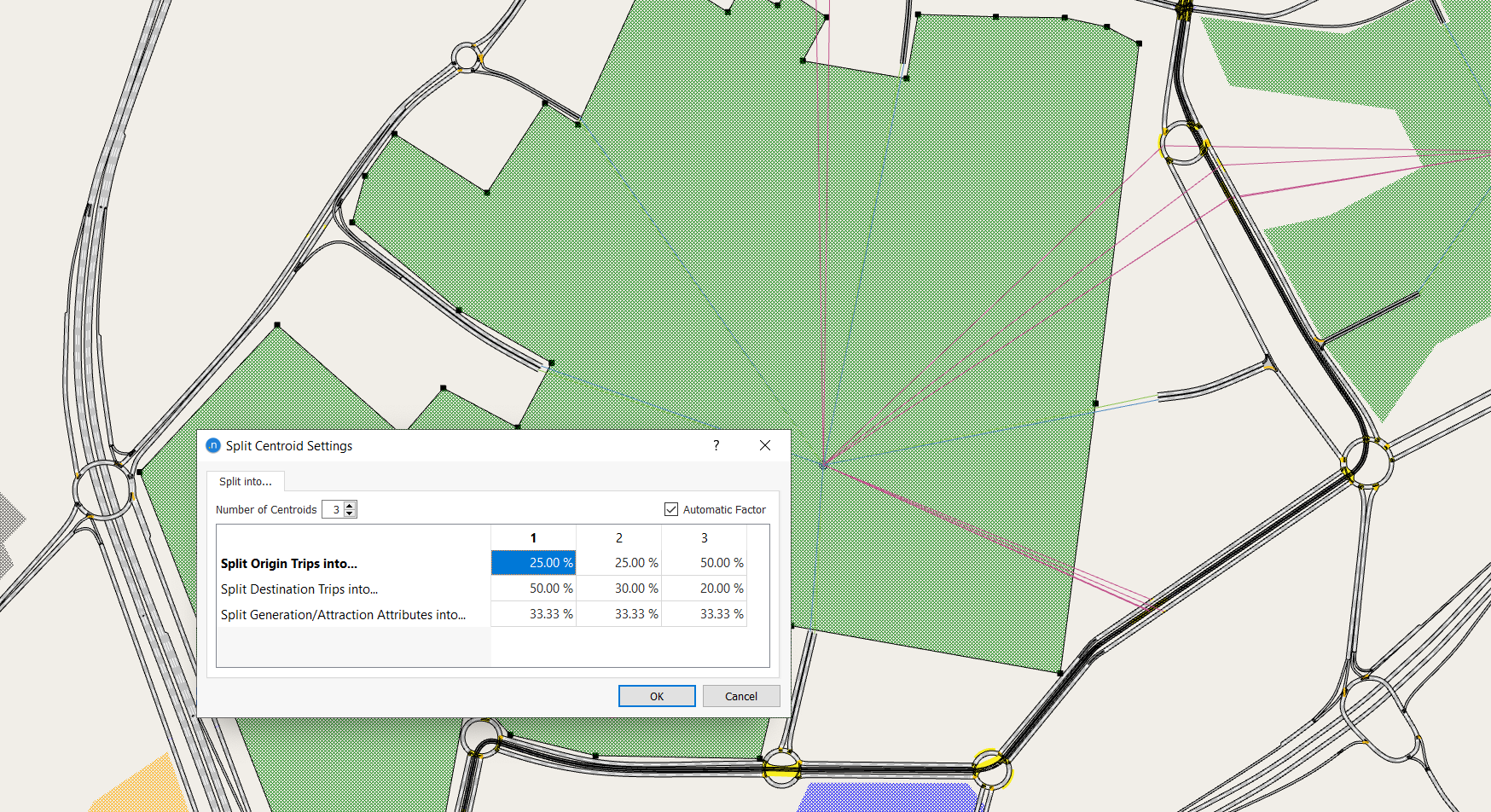
4. Split parent centroids¶
You can split a parent centroid into two or more child centroids and distribute generated and attracted trips to the new centroids, along with other attributes if and when required. These other attributes might include land-use data, park and ride capacity, and car availability. The new process is simpler and quicker than some workarounds you might have used in the past.
Splitting a centroid can be useful if you need more granularity for different areas of a large network. For example, one main parent centroid can be split into four child centroids, each of which generates or attracts trips for a different zone. This can provide more detail and accuracy for your project.
Here is a high-level overview of the process:
- Right-click the parent centroid and select Split Centroid.
- Specify how many child centroids you require.
- Specify origin split by percentage.
- Specify destination split by percentage.
- Position the new child centroids in the network.
- Edit the individual parameters of each child centroid.
- Finally, delete the parent centroid.
5. Enhancements to joining centroids¶
When you join two centroids together, Aimsun Next 22 does several new things that enhance the results of the task.
Joining two centroids now accomplishes the following:
- Joins both polygons of the original centroids and associates the new polygon with the new single centroid
- Aggregates the land use dataset attributes of both centroids
- Aggregates park and ride capacity, if available, in the network
- Aggregates the external arrivals and departures of both centroids
- For matrices that are not trips, the process calculates an average value of the original non-trip values.
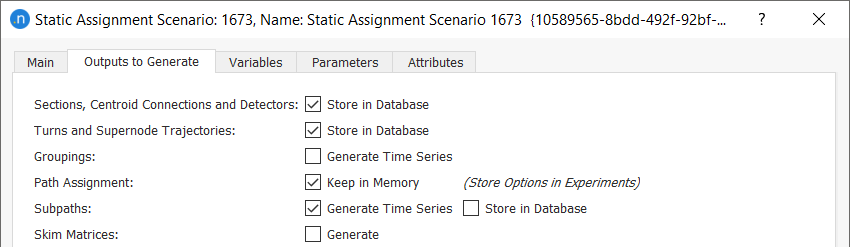
6. More control over outputs for static assignments and adjustments¶
To provide more control over the data you generate and to boost performance, especially with larger networks, we have added new choices to the Outputs to Generate tab of static assignment and static adjustment scenarios.
We have separated the previous option of Sections & Turns into two new options:
- Sections, Centroid Connections and Detectors
- Turns and Supernode Trajectories
and for subpaths you now have the option to tick Generate Time Series and, optionally, Store in Database. Previously, time series were generated and automatically stored in the database with no ability to deselect Store in Database.
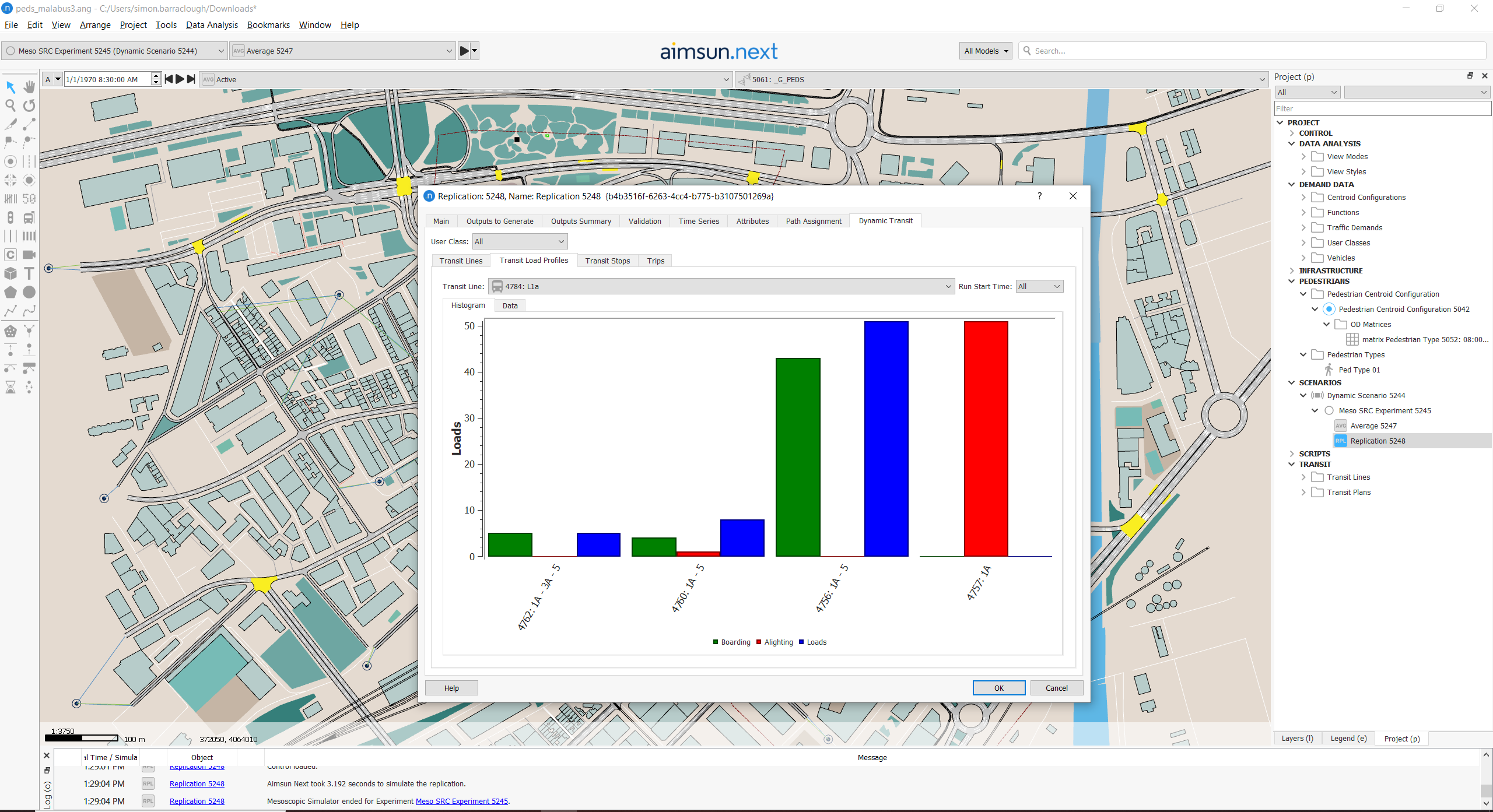
7. Dynamic transit assignment for mesosimulations¶
We have added a simple mesoscopic pedestrian simulator to handle transit assignments for mesosimulations. Previously, such assignments only worked for microsimulations but now they can be performed in mesoscopic models, with simplified behavior. See Mesoscopic Pedestrian Simulator for more information.
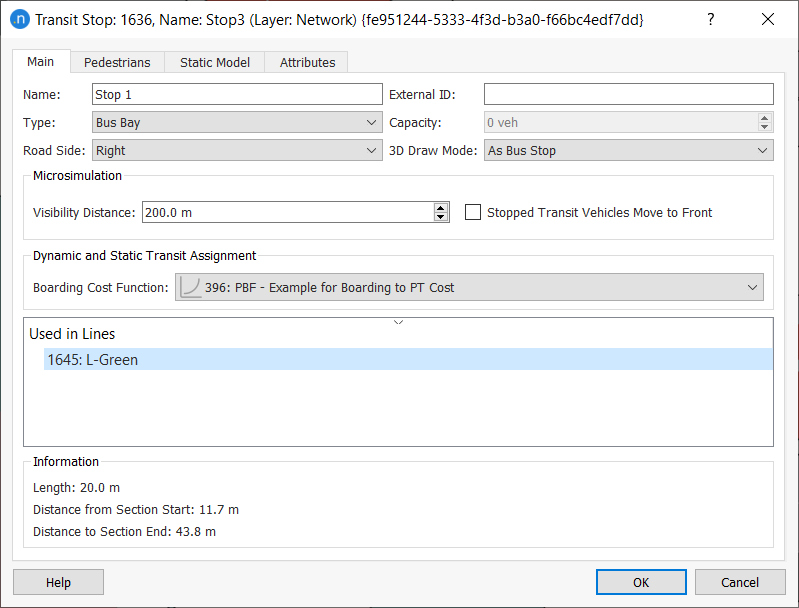
8. Transit Stop dialogs updated for clarity¶
Transit Stop dialogs have been updated to show the Boarding Cost Function on the Main tab for both dynamic and static transit assignment. Microsimulation parameters have also been grouped together.
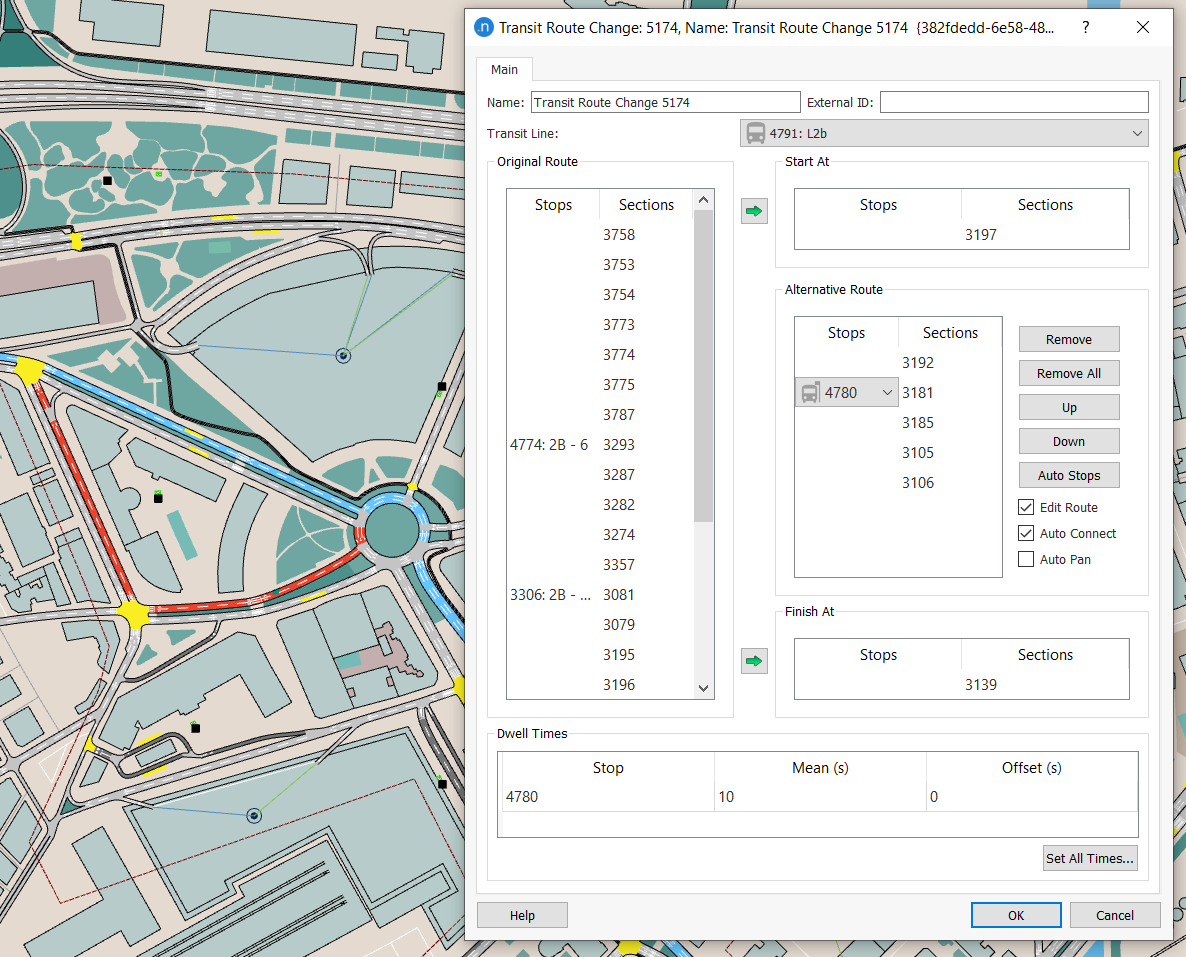
9. Reroute transit lines as part of traffic management and edit detours¶
There is a new traffic management action that enables you to reroute transit lines as part of a strategy to mitigate congestion or other network problems. You can also edit the resulting detours that affect transit vehicles. Currently this action is only available in micro and meso simulations; hybrid macro–meso and hybrid meso–micro simulations are excluded.
10. Pedestrian behavior improved at flashing signals¶
Pedestrian signals at crosswalks have three states: walk, flash (don't walk), and don't walk. Aimsun Next presents these states as green, yellow, and red, respectively. In this release, pedestrians now react more sensitively and realistically to the flashing signal.
11. New pedestrian agent messages in the External Agent Interface¶
If you are using the External Agent Interface to connect your external simulation with Aimsun Next's microsimulator, you can now override our microsimulation and control whether pedestrians wait at crosswalks, cross over, or stop wherever they are in the simulation.
The messages that control this behavior are named WAIT_AT_CROSSWALK, USE_CROSSWALK, and STOP_MOVING. These messages, when sent, will override expected or 'typical' pedestrian behavior and will also override the effect of traffic signal states.
The first two are self-explanatory and the third, STOP_MOVING, means that a pedestrian will decelerate and stop but, if they are close to other pedestrians, they can still move if pushed and they will still react to obstacles.
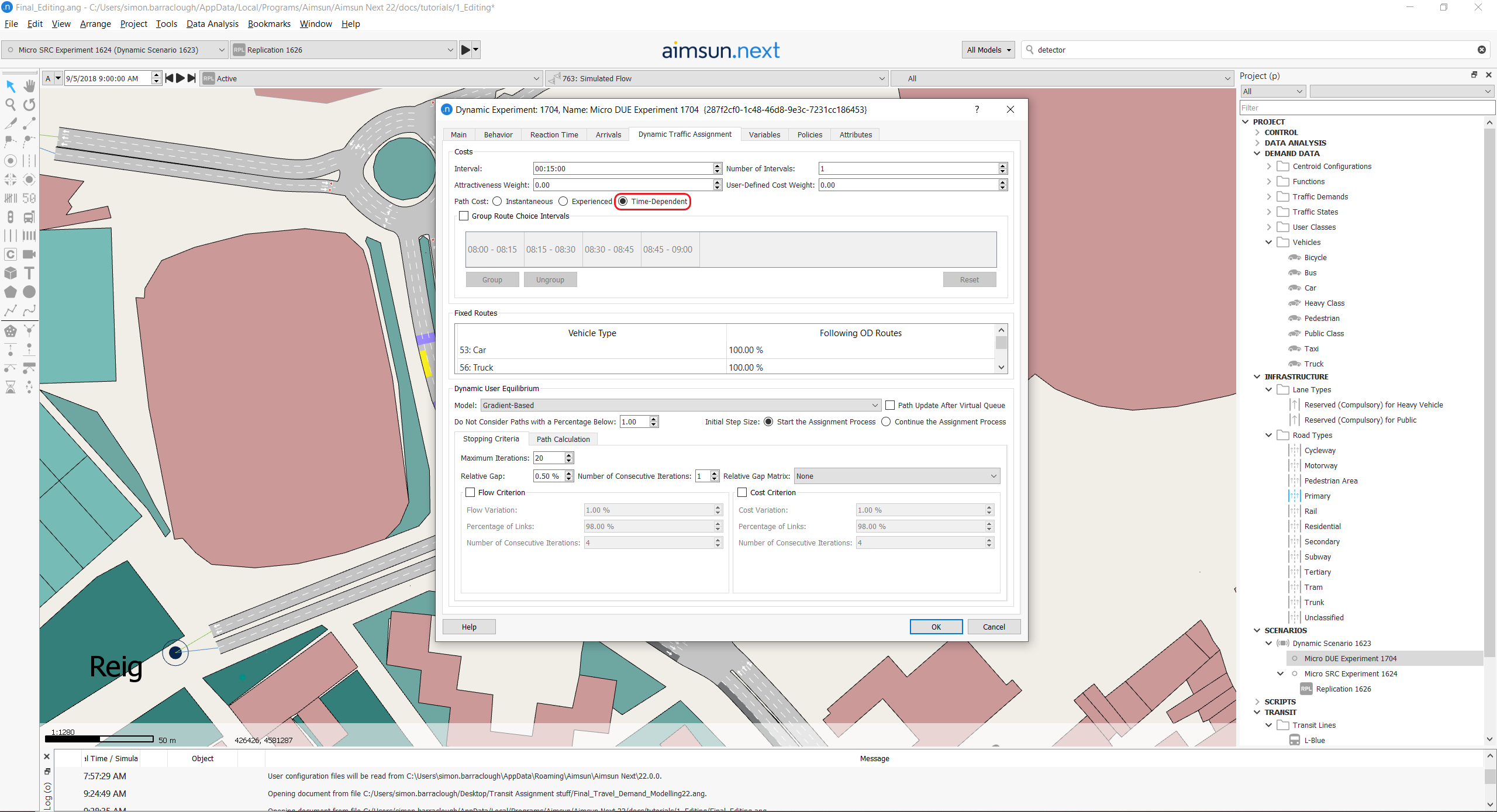
12. Time-dependent shortest paths¶
When running DUE experiments, there is a new Path Cost option alongside Instantaneous and Experienced costs: Time-Dependent costs. You can find this new option on the Dynamic Traffic Assignment tab of experiment dialogs.
The new option enables a time-dependent shortest-path (TDSP) calculation which finds the least-cost route from an origin to a destination while taking into account the fact that the cost for a vehicle to traverse a link changes over time.
To simulate this, TDSP uses the time interval in which the path uses each link, which depends on the departure interval when a vehicle was first generated in the network + its accumulated travel time to the link whose cost is being calculated.
This method is the obverse of the instantaneous shortest-path calculation in which the cost of the departure interval is used for all links in the path.
TDSP is best used in networks where the majority of trips take significantly longer than the route-choice interval to reach their destinations, and in which congestion changes significantly over time. Large-scale models that cover peak periods tend to meet these conditions.
In such cases, TDSP calculates better paths than both Instantaneous and Experienced costs. However, if you have models that already use the Experienced option, you might prefer to continue using this cost at first. But we consider it to be a legacy option and will eventually discontinue it.
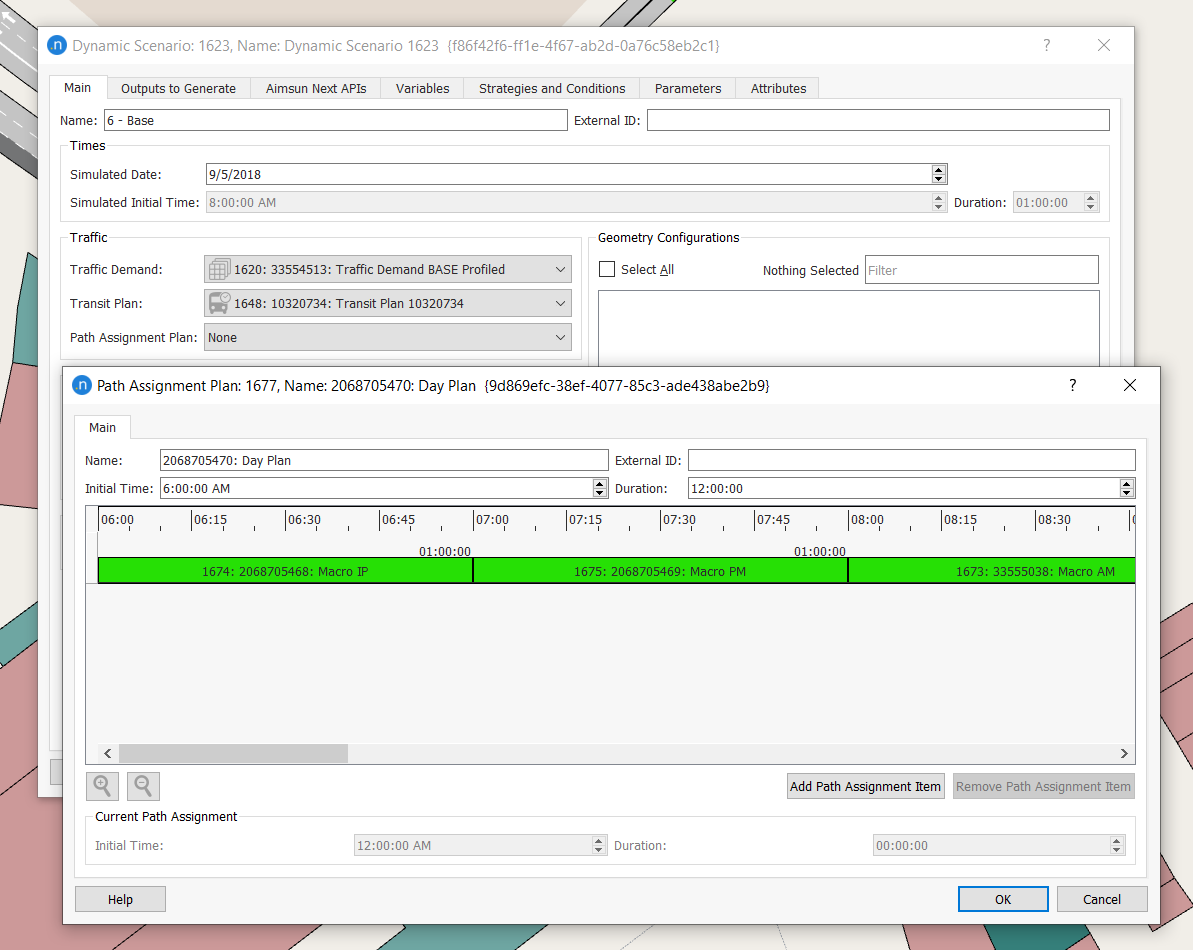
13. Start a DUE with a path assignment plan containing multiple macro assignments¶
In DUE experiments, you can now use a path assignment plan that contains the results of multiple macro assignments. Previously, DUE experiments only accepted a single path assignment as input.
To use a plan containing multiple macro assignments, first run several assignments (e.g. for AM, interpeak, and PM) and join the resulting APAs in a path assignment plan. This plan can then be used with the DUE experiment to warm up a simulation that runs from AM to PM.
14. Vehicles to stay close to the side of the road¶
In microsimulations, where Allow Non-Lane-Based Behavior for vehicles is activated, you can now instruct vehicles to stay close to the left or right side of the road, depending on the direction of travel. There is a new tick-box option in the Vehicle Type dialog named Keep to the Left or Right Side.
This new option is useful for modeling any vehicle that you want to stay close to the left or right side of the road, depending on the direction of travel. The instruction does not apply when vehicles need to cross lanes to turn right or left. Its obvious use is for bicycles but auto-rickshaws or any other type of vehicle can be instructed to behave in this way.
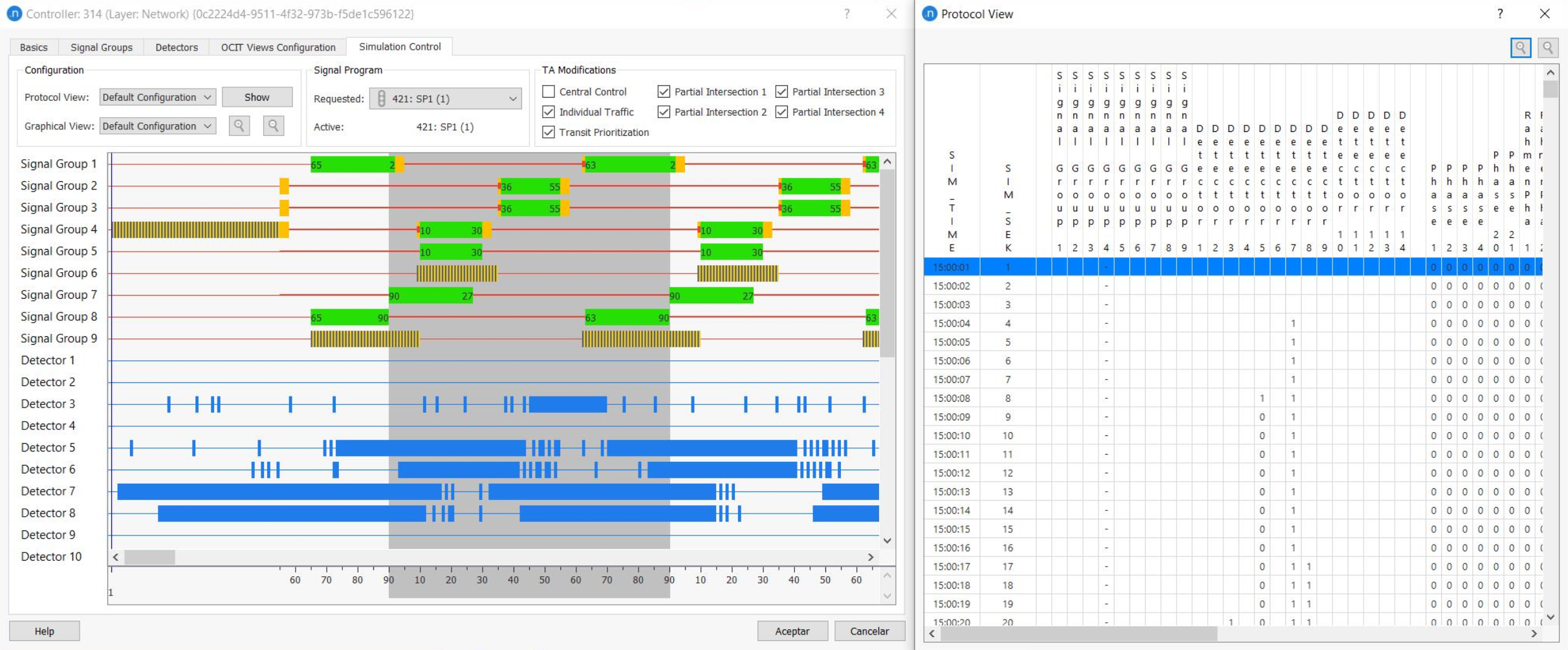
15. VS-PLUS controller dialog enhanced with the OCIT Views Configuration tab¶
The VS-PLUS controller now complies fully with OCIT (Open Communication Interface for Road Traffic Control Systems) standards and features a new tab named OCIT Views Configuration.
It enables you to select which graphical elements and which protocols to display in the Controller dialog while running the simulation. During a simulation, the controller presents a further tab, named Simulation Control. This tab displays the elements you have specified on the OCIT View Configuration tab.
16. Sitraffic detection patterns and detection pattern templates comply with OCIT standards¶
When working with the Sitraffic template and files, detection patterns now comply with OCIT standards, which means that they can handle all data that are relevant to Sitraffic models.
17. A vehicle's Relative Position to the Leader is available via API¶
The Relative Position to the Leader, which is included on a simulation vehicle's Dynamic Attributes tab, is now included in the microsimulator API. The new structure is named LeaderInfVeh and you can find details of its structure in API Changes and Aimsun Next API Vehicles Information.
18. Updated RGap calculation¶
In previous versions of Aimsun Next, the shortest path cost in the RGap formula for paths departing from origin θ~rs~^n^(t) was that of the path with the minimum cost among the set of used paths. From Aimsun Next 22, this is the cost of the newly calculated shortest path with the updated costs at the end of the iteration.
This is more accurate and allows a better assessment of the RGap for OD pairs in which all vehicles use the same path. However, you might observe that the RGap in Aimsun Next 22 is higher and that the DUE performs more iterations in order to converge. If this concerns you, you can still use the previous calculation by adding a new experiment variable with the name $DTARGAPEVALUATION and a value of RGAP20. For more information about RGap calculation and convergence, see The convergence criterion in the user manual.
19. US English for the user interface¶
In line with our website and marketing style guide, the default language for the Aimsun Next UI is now US English. The most notable changes are that 'public transport' becomes 'transit' and 'give way' becomes 'yield', among other minor spelling variations.
Previous Fast Track Features¶
Aimsun Next 22 also includes the following improvements which we released as Fast Track features in previous releases of Aimsun Next 20:
- Record video as you play back a saved simulation
- Service Point objects for the in-built pedestrian simulator
- New on-ramp parameters for Mesoscopic Models
- Import elevation data into an existing network
- Dwell time cost function added to static transit assignments
1. Record video¶
You can now record a video file of a saved simulation at the same time as you play back the simulation. After selecting Replication > Play Recorded Simulation, you can now use the Record button to record a video file (AVI).
As before, you need to set your recording preferences in Edit > Preferences > Microsimulation. While recording, you can click the Record button to pause and restart your recording while the playback is running. This means you can include selected portions of the playback in your video file, rather than the whole run. You can also pan, zoom, and focus on particular details while paused and while recording.
2. Service Points¶
Service Point objects are now enabled in Aimsun's in-built pedestrian simulator. Service points represent areas where pedestrians can wait for a definable amount of time and then continue on their path. You can use them to model information boards, ATMs, and shops, etc. You can also create and orientate queues at service points.
3. New on-ramp parameters¶
There are two new parameters that you can use to calibrate the behavior of vehicles in the mesoscopic on-ramp model. The parameters are named Cooperation Gap and Merging Gap. Use the former to set the minimum gap that vehicles in the on-ramp lane look for in order to move into the mainline lane. Use the latter to set a minimum gap that will be left by vehicles in the mainline lane
4. Import elevation data¶
You can apply elevation data to an already existing Aimsun Next network using the Elevation Importer feature. To do so, from the main menu select Tool > Apply Elevation Using DEM file.
5. Dwell time cost function¶
Static transit assignments now include the dwell times of transit vehicles, taking into account the aggregated volume of passengers alighting and boarding at the transit stop from the transit line for the whole assignment period.
Your feedback¶
We have made every effort to ensure that the information contained in this manual is accurate. Your feedback helps us to improve Aimsun Next and decide which new features to add, so please send any comments to support@aimsun.com.