LISA Interface¶
LISA is a software package from SCHLOTHAUER & WAUER GmbH which is used to evaluate and optimize traffic controls for single intersections and for road networks. The LISA adaptive signal controller dynamically controls signals based on the actions of vehicles passing over detector loops in the vicinity of the signalized junctions to optimize the traffic flows.
Architecture¶
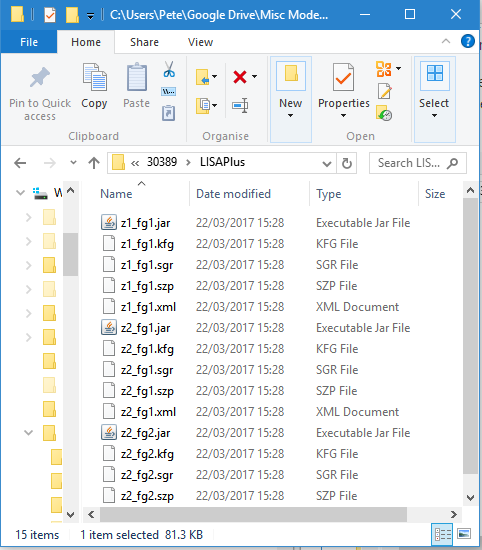
The LISA controller configuration files are created by LISA and saved in a single directory, this contains a Java ".jar" file and 4 configuration files for each linked controller. The file names for these files are set by the traffic computer ID and field device ID for the controller. When the simulation is run, the LISA plug-in takes these files and uses them to emulate the LISA Controller.
Requirements¶
The requirements are:
- The Adaptive Control Interfaces License Extension for Aimsun Next.
- A Java Runtime Environment version 8 (1.8.0) installed on the computer running the simulation. The installer for the different operating systems can be downloaded from https://www.oracle.com/java/technologies/downloads/ under the section Java archive > Java SE 8.
Note that LISA does not need to be installed to run the simulation using the LISA signal controller, as the LISA OML Server is included in the Aimsun Next installation. However, it must be available if the modeler wants to edit the LISA control files.
Model Preferences¶
The path to the LISA emulator and the directory which holds the LISA configuration files are set in the Preferences Editor.
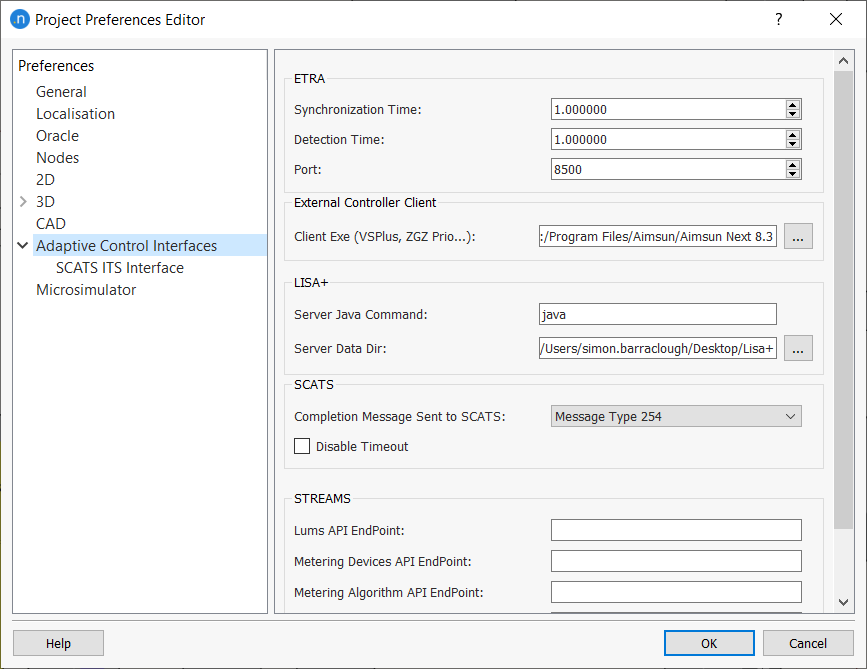
The Java Command specifies how to start the Java VM that runs the LISA Emulator. In this case, the Java VM is in the system path and will be run on the local host computer, hence the simple java command will suffice. In other cases, if the emulator is run remotely or if the Java VM is not in the system path, the command must reflect this and specify how to start the VM.
The Server Data Dir is the directory where the configuration files are stored. The file names match the Traffic Computer ID and the Field Device ID of the controller for each junction and should not be changed.
The LISA interface can be configured to produce debugging information. This option is selected in the Scenario Editor. When this option is active, Aimsun Next will generate log files stored in the same folder as the Aimsun Next document, named AimsunNextSignalState_ID.log where ID is the LISA Controller ID.
LISA Controller Editor¶
The signal stages, the transit lines and the detectors in the simulation model must be mapped to the corresponding objects in LISA. This is achieved in the controller editor. The simulation controller must also refer to the correct LISA controller files which were produced by the LISA software as it was used to edit the junction control parameters.
The Controller is created and edited using the Controller Editor. If the LISA option is selected in the main tab, the editor is configured for LISA.
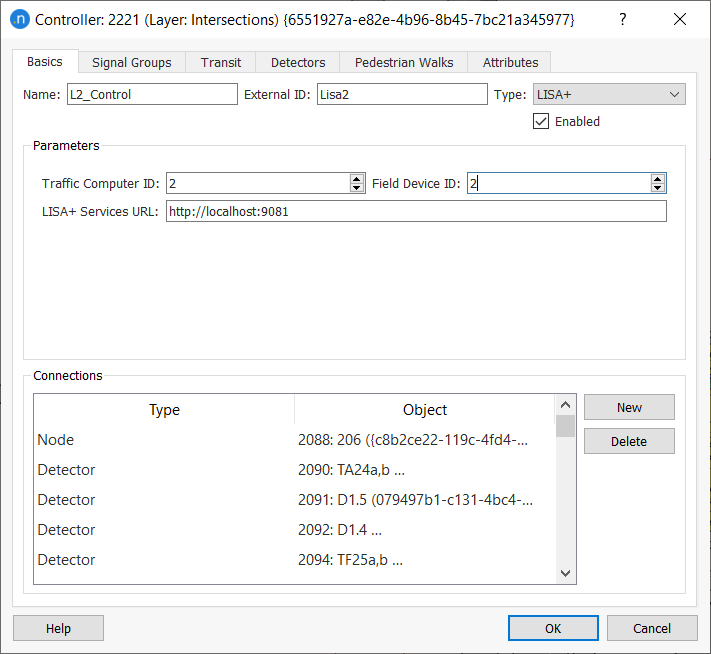
The parameters required to link to the LISA Controller Emulator are:
- Traffic Computer ID: An identifier set in the LISA Control Editor.
- Field Device ID: An identifier set in the LISA Control Editor.
- Signal Timing Plan Name: An identifier set in the LISA Control Editor.
- LISA Service URL: The link (computer name and port number) to the LISA emulator. Here in this example, the computer is the same as the one running the simulation (localhost) and the port number is the one fixed by the emulator.
The Connections box lists all the items (Nodes and Detectors) that have been linked to the Controller using the Connection Tool.
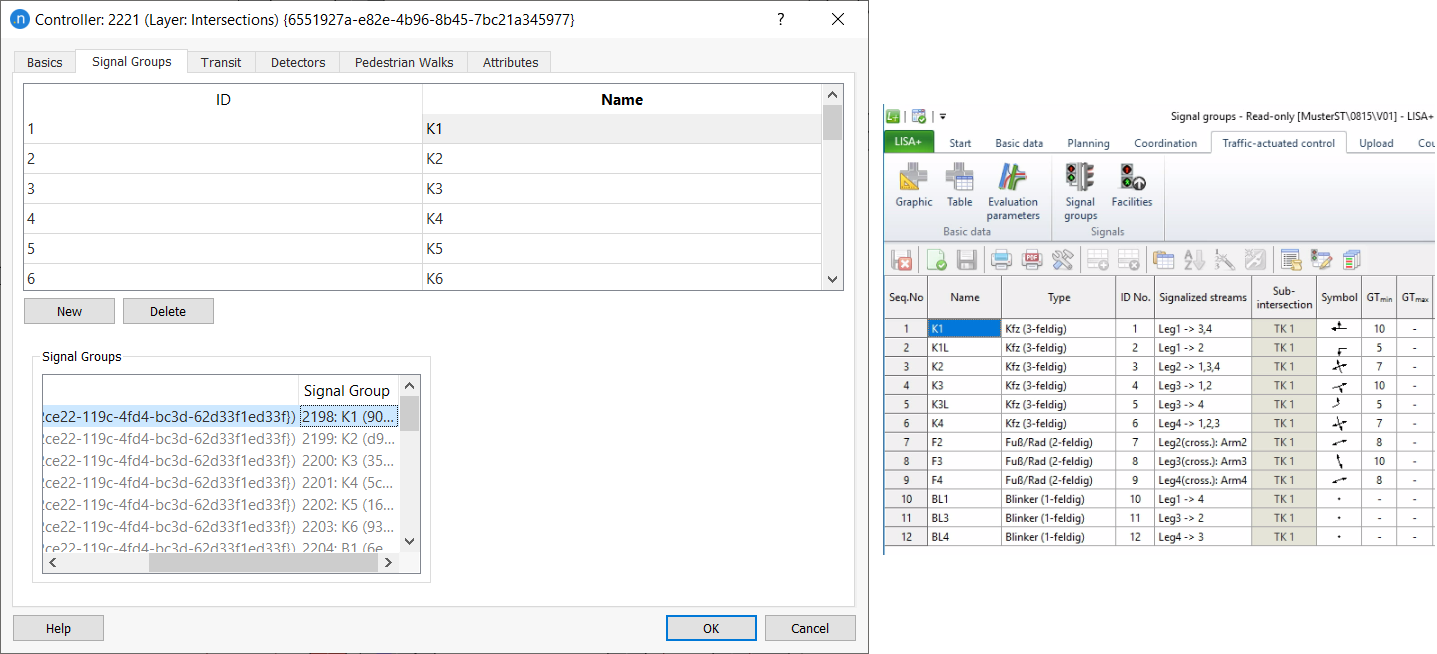
Signal Groups¶
The Signals Group tab is used to match the signal groups in LISA to the signal groups added to the node using the Nodes Editor. Each signal group in LISA must be matched to the equivalent group in the node.
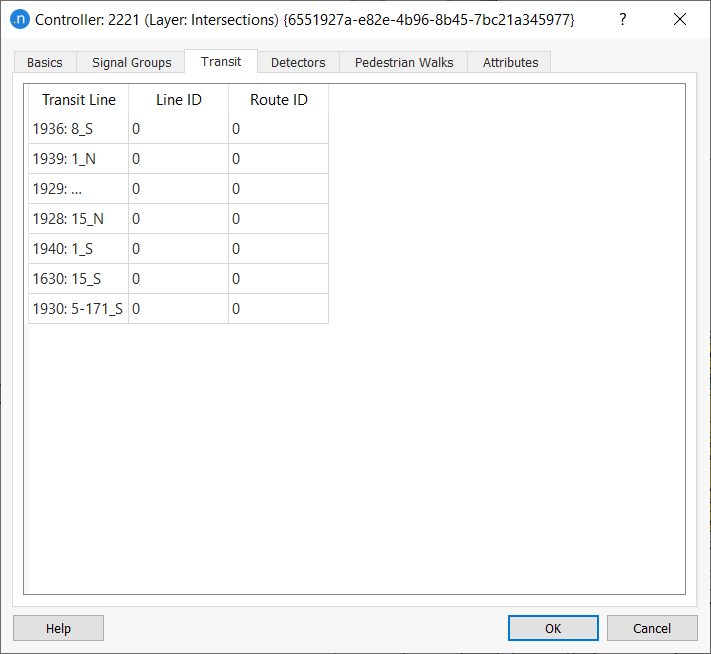
Transit Lines¶
Similarly, the transit lines which pass through the controlled junction are listed in the controller Transit tab and can be linked to the transit lines identified in the LISA Controller configuration.
Detectors¶
The Detectors tab of the controller editor is used to link the controller to the detectors in the vicinity of the controlled junction. In the Detectors tab, the link is made to the detectors identified in the LISA Controller configuration.
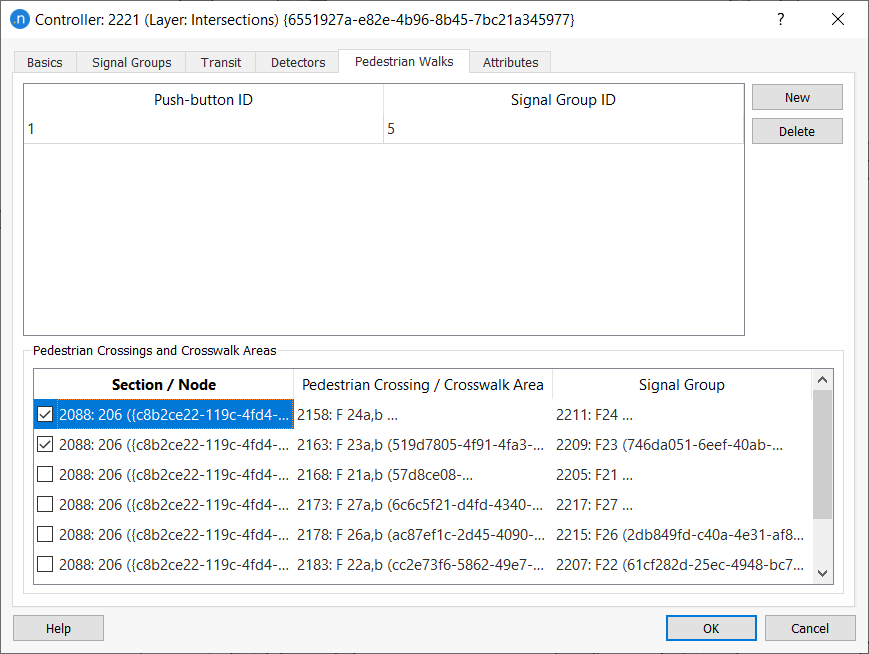
Pedestrian Walks¶
Pedestrian Crossings at the controlled junction should be assigned to a signal group in the Nodes Editor. These crossings will then appear in the Pedestrian Walks tab of the controller editor and can be assigned to a push button ID in the LISA Controller configuration.
Running the Simulation¶
When the simulation is run, the java VM is started and the signals are placed under LISA Control. If the control connections are not properly specified, the signals will be frozen.