Valid Target Lanes¶
Valid Target Lanes ¶
The calculation of the Valid Target Lanes is common for all models (Meso, Micro, and Hybrid). The set of valid target lanes are the input for the lane selection and lane changing models.
The calculation of the Target Valid Lanes is based on the traffic conditions present in the section, the turn lanes specified for next junction, and the possible obstacles on the path to the junction including incidents, compulsory reserved lanes, closed lanes, turn closures, and the presence of a transit stop, in case of a transit vehicle. The influence of each element is determined by the following parameters:
- Turning movement: For each turn, the turn look-ahead distances or “visibility distance” is defined. This is the distance upstream where vehicles become aware of the feasible lanes for their planned turning movement. The next figure shows an example of the turning movement from Section C to Section D with three different turn look-ahead distances (X, Y, and Z). The lanes used in the turn are the two rightmost in sections A and B and the three rightmost, including the filter lane, in section C. The influence of each distance depends on the type of model used:
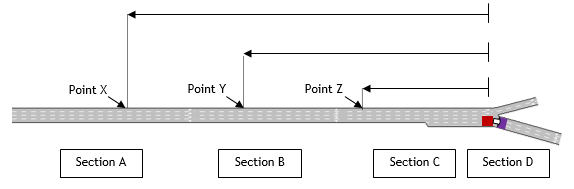
Note that point X is inside section A, point Y inside section B and point Z inside the last section before the turn, section C. Note that, in a mesoscopic model, any influence point inside a section is taken into account at the start of the section.
-
Mesoscopic model:
-
Point X: All vehicles that enter section A and subsequently sections B and C are influenced by turning movement C-D, so the valid target lanes are the two rightmost lanes.
-
Point Y: All vehicles that enter section B and subsequently section C are influenced by turning movement C-D, so the valid target lanes are the two rightmost lanes. -Point Z: All vehicles that enter section C are influenced by turning movement C-D, so the valid target lanes are the three rightmost lanes.
-
Microscopic model:
- Point X: All vehicles before point X are not influenced by turning movement C-D, so the valid target lanes are all section lanes and all vehicles after point X in sections A B and C are influenced by turning movement C-D, so the valid target lanes are the two rightmost lanes.
- Point Y: All vehicles before point Y are not influenced by turning movement C-D, so the valid target lanes are all section lanes and all vehicles after point Y in sections B and C are influenced by turning movement C-D, so the valid target lanes are the two rightmost lanes.
-
Point Z: All vehicles before point Z are not influenced by turning movement C-D, so the valid target lanes are all section lanes and all vehicles after point Z are influenced by turning movement C-D, so the valid target lanes are the three rightmost lanes.
-
Incident presence: Each incident created by a traffic management action has a visibility distance that defines the distance upstream where the vehicles are aware about the presence of the incident.
-
Reserved Lanes: All reserved lanes of a section have a visibility distance that defines the distance upstream where the vehicles are aware about the presence of the reserved lanes.
-
Closed Lanes: Each lane closure created by a traffic management action has a visibility distance that defines the distance upstream where the vehicles are aware about this lane closure.
-
Turn Closure: Each lane closure created by a traffic management action has a visibility distance that defines the distance upstream where the vehicles are aware about this turn closure.
-
Transit Stop: Each Transit Stop has a visibility distance that defines the distance upstream where the vehicles affected by this stop are aware about it.
The calculation of the Target Valid Lanes for a vehicle is not restricted to a specific number of turning movements (defined as a user parameters in previous versions) and considers the effect of all obstacles and turning movements in all sections determined in its path plan if the distance from the vehicle to obstacle/turning movement is less than the visibility distance of each element.
The calculation of the Valid Target lanes generates different results depending on the type of model for each vehicle :
-
Mesoscopic model: The mesoscopic model generates one set of valid lanes considering the “Visibility distance” of all obstacles and the look-ahead distance defined at level of turn
-
Microscopic model: The Microscopic model generates two sets of valid lanes considering the “Visibility distance” of all obstacles and the Look-Ahead and Critical Look-Ahead defined at level of turn. This calculation returns:
-
Set of Target Lanes determined by Zone 3 influence (TL3)
- Set of Target Lanes determined by Zone 2 influence (TL2)
Hybrid Model: The hybrid model generates one set of valid lanes in the meso areas and two sets of valid lanes in the micro areas. The propagation of the look-ahead distance of the mesoscopic areas onto the micro areas affects the set of target lanes determined by Zone 3 influence, as the mesoscopic look-ahead distance is considered as a Critical Look-Ahead.
The propagation of the look-ahead distances of the micro parts onto the mesoscopic parts uses the Critical Look-Ahead as look ahead distance.