Microscopic Simulator Transit Modeling¶
The main difference between transit vehicles and other road traffic is that they follow fixed routes and that they also run to a pre-defined timetable. Transit modeling is applied in Aimsun Next whenever a transit plan is loaded. A transit plan in Aimsun Next consists of transit lines (routes, reserved lanes, and bus stops), the timetables for each line (departures schedules, stop times, and type of vehicles) and the transit vehicles (buses, minibus, trams, etc.).
Transit Vehicle Modeling¶
Buses provide the most common form of transit in urban areas, but other type of vehicles can be considered, such as guided buses, trolley buses, trams or Light Rapid Transit (LRT). They come in many different sizes and shapes. Transit vehicles are defined as any of these vehicle types. Therefore the vehicle attributes used in the vehicle modeling are the ones already described in vehicle attributes.
Vehicle Generation Model¶
Transit vehicles are generated in the network on the first section of each transit line. The arrival times are derived from the bus schedule, defined in the Timetable for the line.
If there is a bus stop type Terminal in the first section of a bus line, buses will start their trip at this bus stop. Otherwise, they start their trip at the beginning of the first section. Similarly, if there is a bus stop type Terminal in the last section of a bus line, buses will end their trip at this bus stop. Otherwise, they will finish their trip at the end of the last section.
Vehicle Movement Model¶
Transit vehicles follow a fixed route through the network. Transit vehicles normally behave as any other vehicle does, according to car-following and lane-changing models. When driving in a section containing a bus stop allocated to that line, transit vehicles change their normal behavior in order to halt at the bus stop. This means that they will try to move to the appropriate lane before reaching the bus stop and they will decelerate before coming to a halt at the bus stop. The additional rules in the vehicle movement model will:
- ensure that transit vehicles move into the lane to access the stop at a suitable time,
- make transit vehicles pull into a bus bay or move out of the road if required to stop at a bus terminal stop,
- ensure that transit vehicles are able to exit from a bus bay either by waiting for a suitable gap in the traffic or by influencing the other traffic to let the vehicle exit.
The Visibility Distance parameter set in the Bus Stop Editor governs the lane changing behavior with respect to the Bus Stop. When the distance from the bus to the next stop is lower than the Visibility Distance , the bus behaves as if it was in lane change zone 3 as described in the Microsimulation Section on Lane Changing.This means it is forced to reach the appropriate stopping lane.
Reserved lanes in a network can be designated for use by transit only. When such a lane is available in any section of the transit line, the transit vehicles will use it. Turn movements and transit stops have higher priority than reserved lanes, therefore a transit vehicle will leave a reserved lane whenever it needs to reach an appropriate turn lane or halt at a transit stop.
Stop Model¶
Transit vehicles stop at fixed points along the route to pick up and set down passengers. If the bus stop is full when a the transit vehicle arrives, i.e. another vehicle is already there and there is no room for more, then the vehicles will wait until the stop is vacated and there is enough space available. The amount of time spent at the stop is determined by the Stop Time parameter set in the Timetables Editor which defines a mean stop time and a deviation. The actual stop time for the transit vehicle is sampled from a normal distribution using these parameters. Subsequently, it will continue its route following the bus line until the next bus stop.
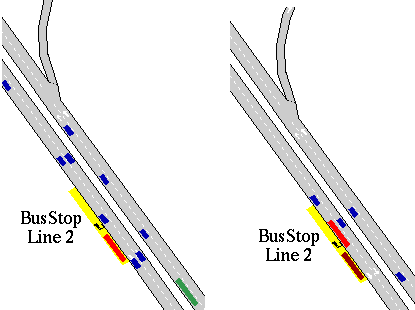
Normal Bus Stop¶
This is the type of bus stop that is located along the roadside. Transit vehicles will stop on the street lane at the end of the bus stop, thus blocking the traffic in that lane (see figure below). Other vehicles will overtake the transit vehicle if there is more than one lane. The transit vehicle will be stopped during the stop time and then will normally start accelerating using the same lane, unless it needs to change lanes to facilitate its next turn or to move to a lane reserved for transit in that section.
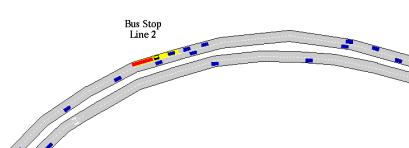
Bus Bay Stop¶
This type of bus stop has a dedicated short lane at the roadside for the bus to move out of the traffic stream, thus allowing following traffic to pass the bus after it stops. Transit vehicles will stop on the street lane at the end of the bus stop, and then will pull into the bus bay, thus blocking the traffic in that lane but only during the lane changing maneuver (see figure below). The transit vehicle will be stopped during the corresponding stop time and then will wait for a suitable gap in the traffic to go out from the bus bay. It applies a lane-changing model that can even influence the other traffic to yield to let the vehicle exit if necessary.
If a second transit vehicle arrives at the bus bay before the previous one has left, it will stop on the street lane just behind the first transit vehicle and then, if there is space available at the bus stop it will pull into the bus bay. Otherwise, it will wait until the previous vehicle leaves the bus bay, thus blocking the traffic in that lane during the time that is waiting to enter.
The bus bay stops have an additional parameter Stopped vehicles move vehicles to front that, when checked, whenever a transit vehicle leaves the stop, will move the remaining stopped vehicles to the front of the bus stop. This action will increase the space at the end of the stop allowing vehicles that could be waiting outside the stop to enter and start their stop.