Adaptive Control Controllers¶
This section describes the Controllers required to link to the Adaptive Control Module and the associated software interfaces developed in the Aimsun Next environment. A controller is the Aimsun object which represents real traffic signal controllers and their relation with detectors, signal groups, and pedestrian crossings to monitor the control plan information in junctions.
Controller Editing¶
A Controller is created and position in the network, then linked to adjacent junctions and detectors and finally configured to link to the external software interface, as documented in the Adaptive Control Interfaces Section.
Creating a new Controller¶
Click on the controller icon  , then click on the drawing window to position the controller. It can be selected, edited, and moved like a regular Aimsun object.
, then click on the drawing window to position the controller. It can be selected, edited, and moved like a regular Aimsun object.
A double-click will open the controller editor:
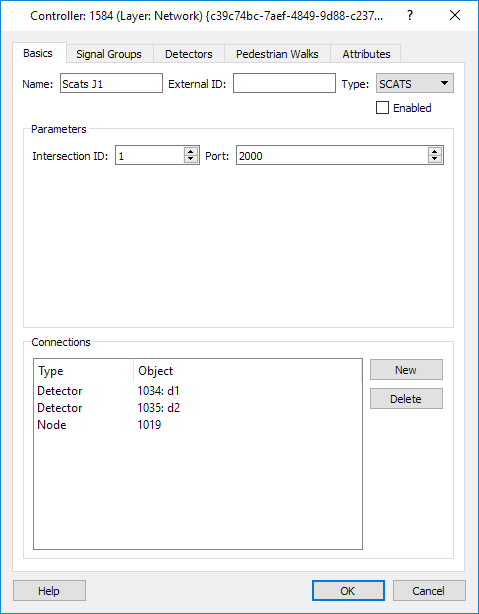
The Basics tab shows the following information:
- Name and External ID: As for any Aimsun object.
- Type: Select the Type of Controller.
- Enabled: Aimsun Next considers this controller in the communication process only when this flag is active.
- Parameters: The list of parameters shown here depends on the selected Type of Controller.
- Connections: List of objects connected to the controller.
- Connections: The nodes linked to the controller are shown, nodes are added by using the Connection tool to join the controller with other objects. Nodes can also be added by selecting "New" then clicking the node in the 2D window.
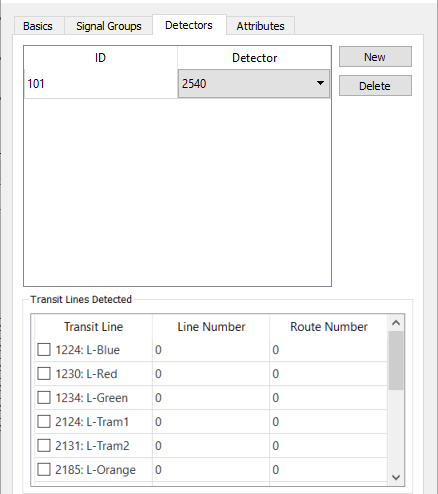
Controller Objects¶
In the Signal Groups, Detectors, Transit and Pedestrian Walks tabs appear according to the capability of the type of external controller selected. Each object is given an external ID used in the communication with the controller and other information according to controller type. For example if Detector 2540 is linked to the controller, it can be given ID 101 in the communication and linked to transit lines as shown below.
The details of the link for each controller type is described in the appropriate controller section.
The type of controller is defined depending on the Adaptive Control Interface used to link to Aimsun Next:
- SCATS
- SCATS-RMS
- Siemens UTC System
- UTOPIA
- VS-Plus
- Lisa+
- Sitraffic Office
- ETRA
- Indra
- SICE
- Telvent
- Telent
- ZGZ Prio
The detail for each interface is described in the relevant section as the use of signals and detectors varies between the different interfaces and this is reflected in the customization of the tabs in the Adaptive Controller properties editor.
Log files are output by some control interfaces. The option to create these files is selected in the Controllers of the Scenario Editor.
Note that the Sitraffic Office controller also includes two more tabs, one to specify the dynamic information to be displayed and the other to show a time line of activity and protocol use.
Preferences¶
Adaptive Control Interfaces Preferences are accessible from the Preferences command in the Edit menu, which opens the System Preferences editor (when no model is open) or the Model Preferences editor (when a model is open).
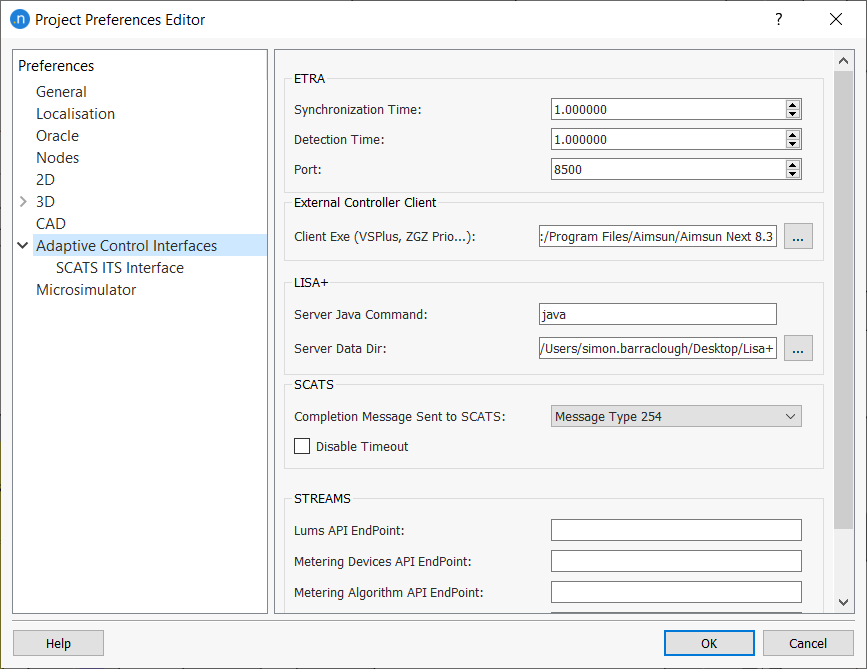
The preferences that can be defined are:
External Controller Client: The path to the EXE file for the client executable.
SCATS¶
- Completion message sent to SCATS: This can either be Message 127 or Message 254 depending on the SCATS configuration.
- Disable Timeout: False by default. This can be activated to disable timeout so that Aimsun Next will wait for the message to arrive without timing out. If the message does not arrive Aimsun Next will hang forever. It is only recommended to activate this option in very special cases; for example, when debugging the application.
And in the SCATS subsection:
- The SCATS Central Manager IP address and ITS communications port number.
Refer to the SCATS section section for more details.
ETRA*:¶
- Synchronization Time: Interval (in seconds) when Aimsun Next and ETRA will synchronize data.
- Detection Time: Interval (in seconds) when Aimsun Next will send detection data.
- Port: Communication port.
LISA+¶
- Server Java Command: The Java command required to start the Java VM that runs the Lisa+ Emulator.
- Server Data Dir The directory where the configuration files are stored.
Refer to the Lisa+ section section for more details.
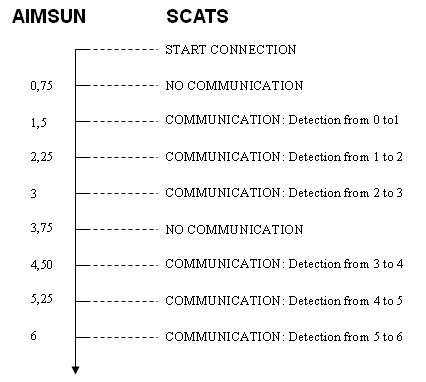
Time Synchronization¶
Aimsun Next and most adaptive controllers interchange information every second, this is a requirement of the controller. This implies the detection cycle in Aimsun Next must be one second. As this is independent of the simulation step, the communication is based on sending one second detector information in the first simulation step after it is available. The next figure illustrates when the communication with the controller is made, using 0.75s as simulation step: